Manipulator model performance refers to how well a model makes reliable predictions compared to the physical manipulator model and the validity of those predictions.
Control performance, on the other hand, relates to how effectively a system or process is managed or regulated to achieve desired outcomes. In the context of model control, it could refer to the ability to maintain stability, optimize parameters, and ensure consistent results under varying conditions. Monitoring control performance helps identify issues and make adjustments to improve overall system efficiency and accuracy.
In this section, we present the VMS software for designing and simulating the customized manipulator.
You can find more details of the control performance here.
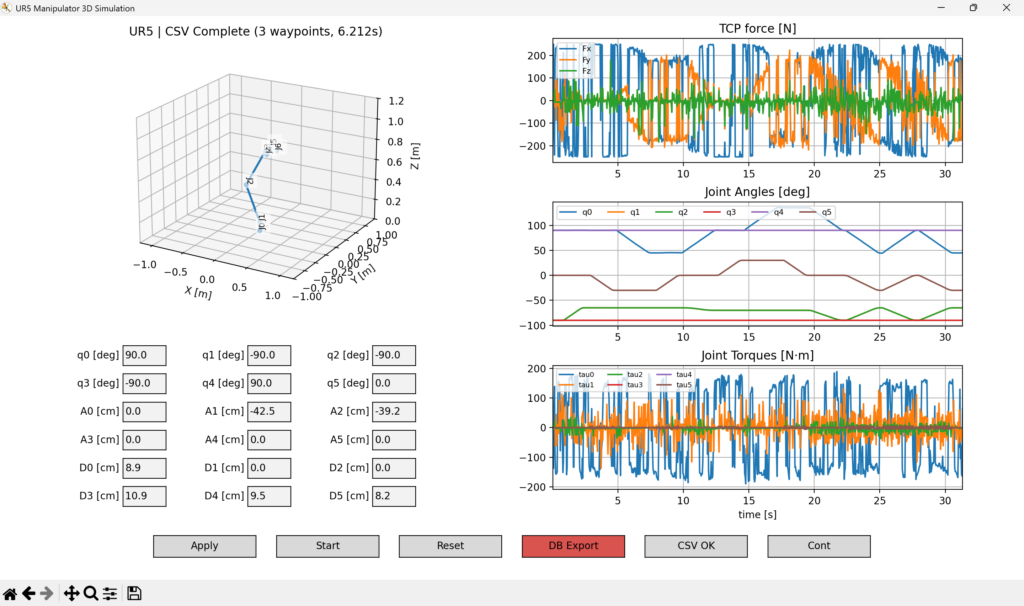
Figure 1. Python-based VMS physics engine.
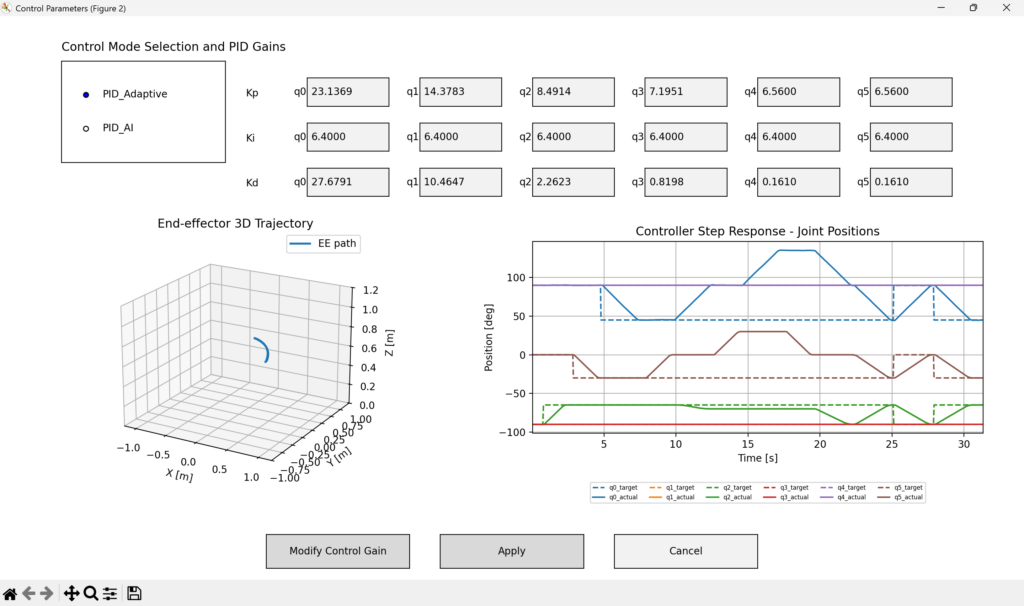
Figure 2. The control target and response of the controller.
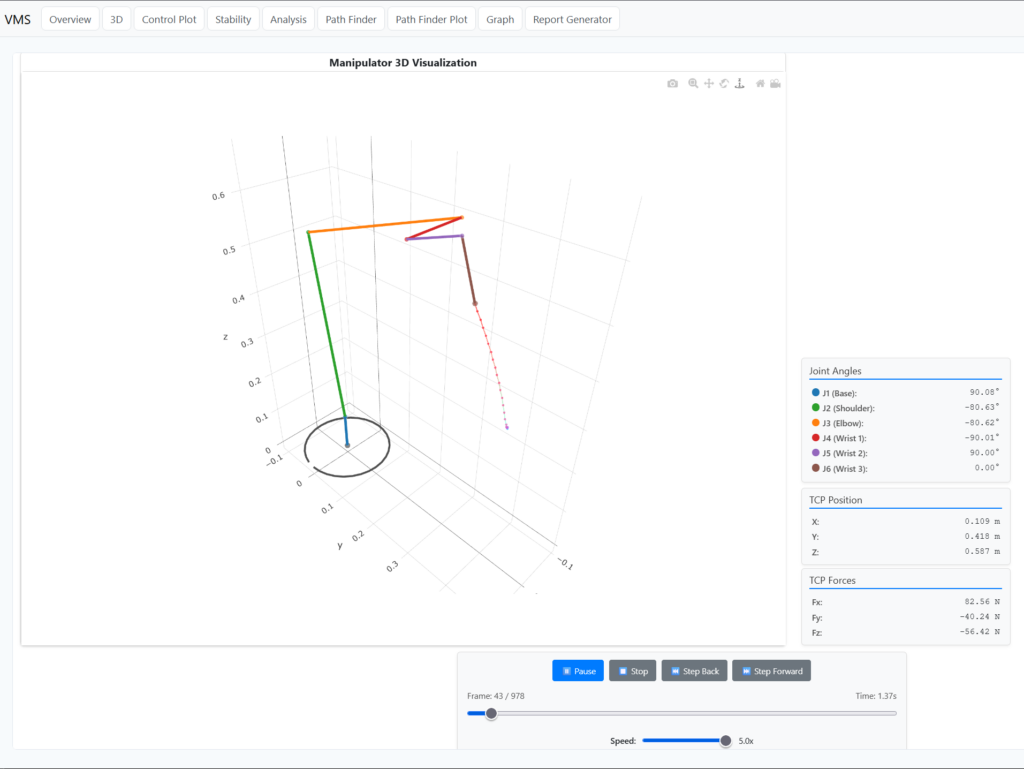
Figure 3. The web interface 3D manipulator simulation
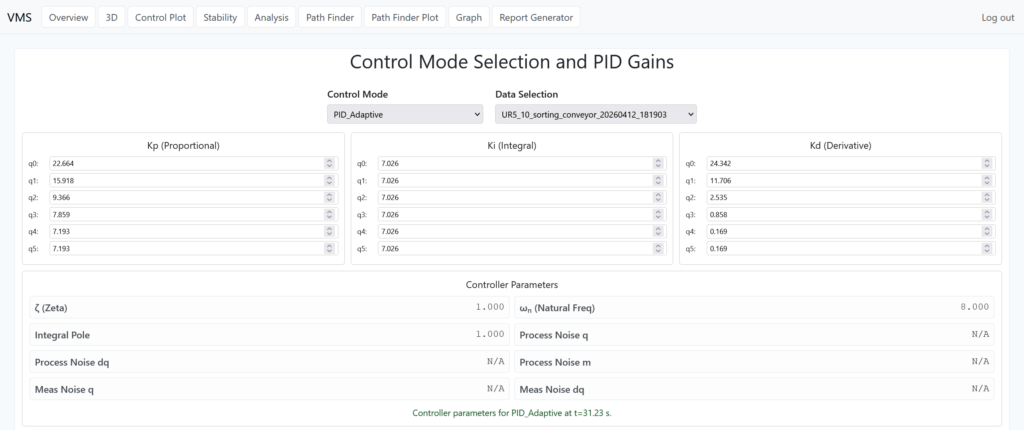
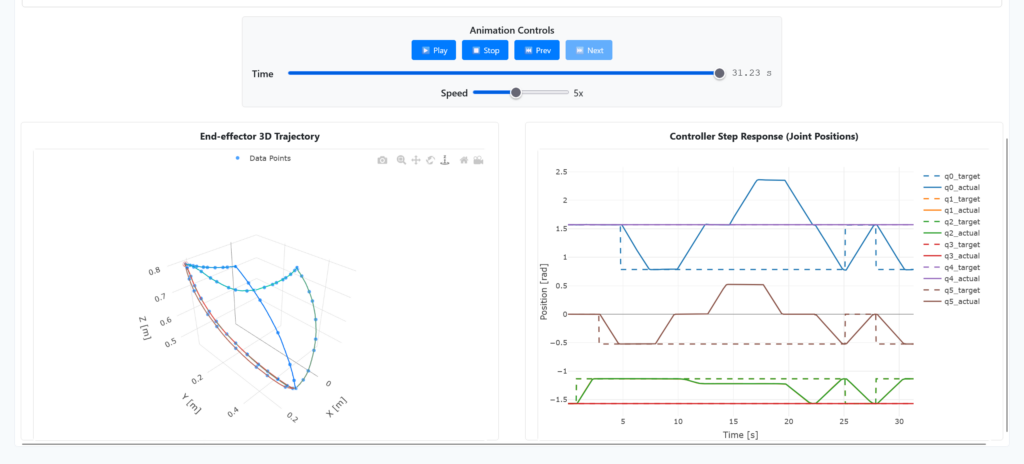
Figure 4. The control response and trajectory tracking of the manipulator’s end-position.
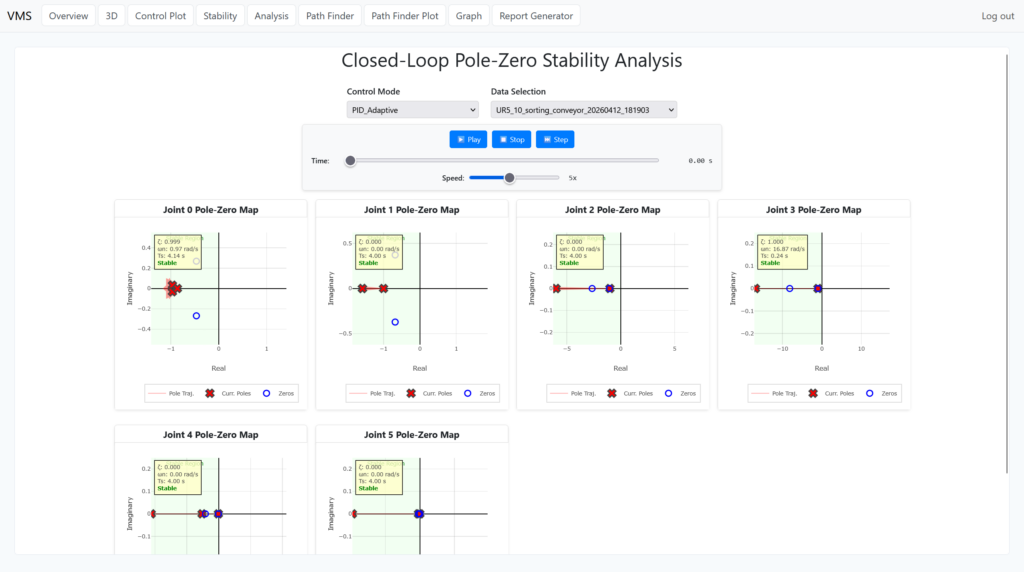
Figure 5. Stability plot of each joint of the manipulator.
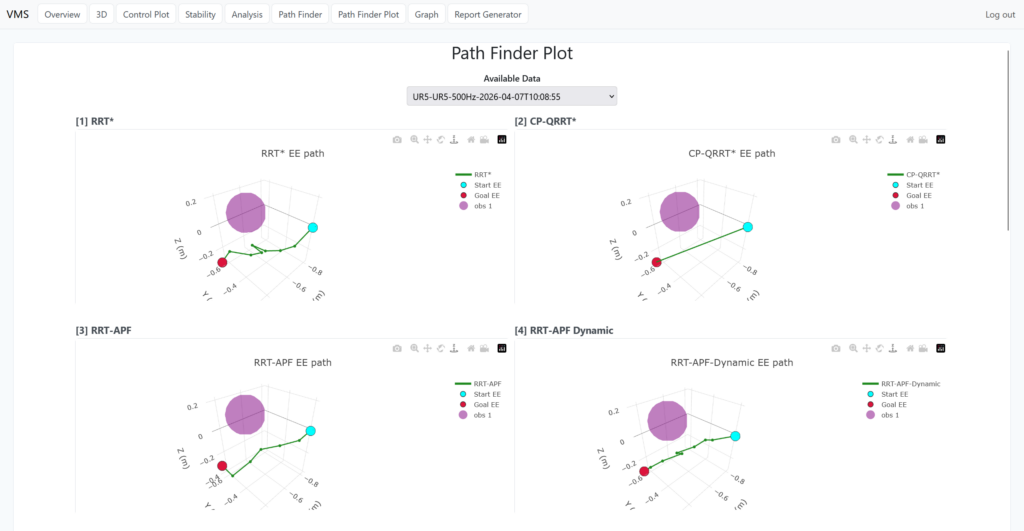
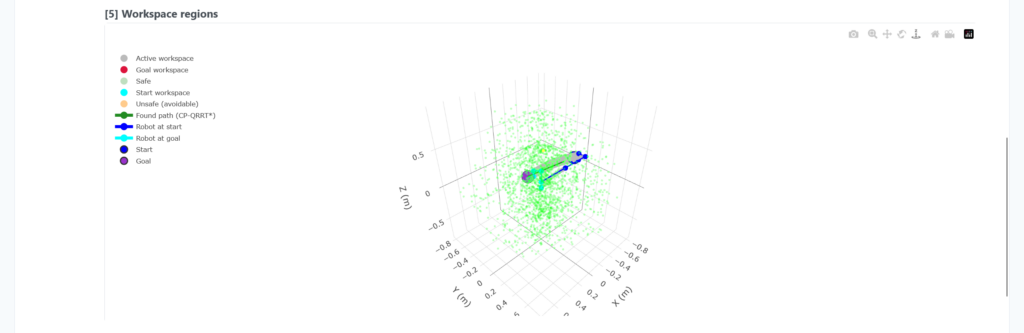
Figure 6. Object-avoidance algorithms (OAAs) to replan the trajectory and to map the manipulator’s operational boundary.
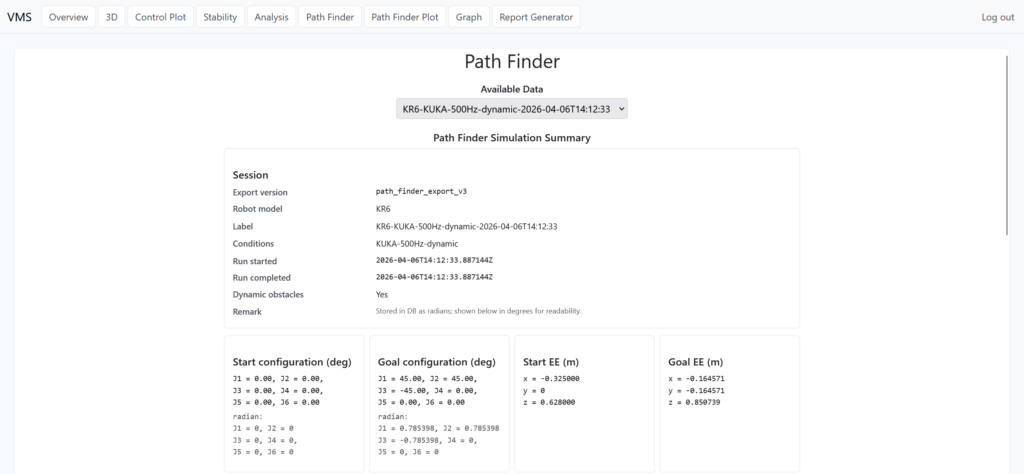
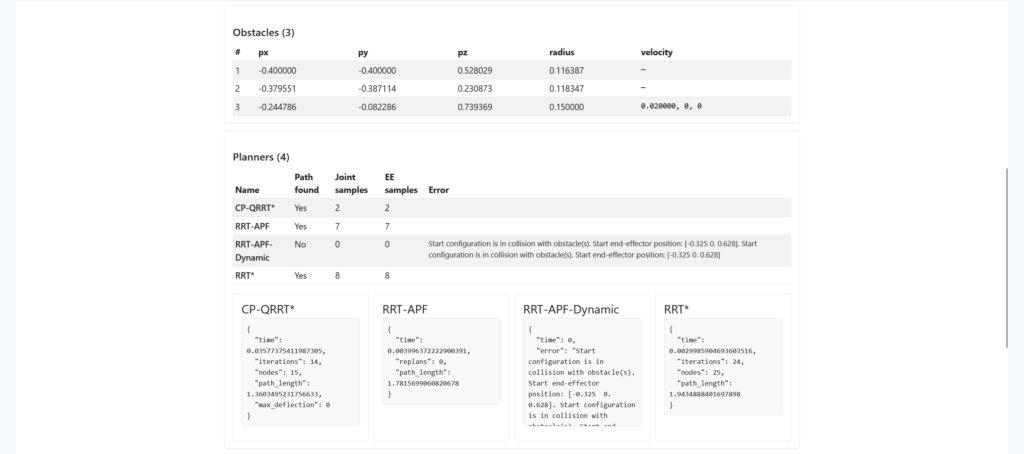
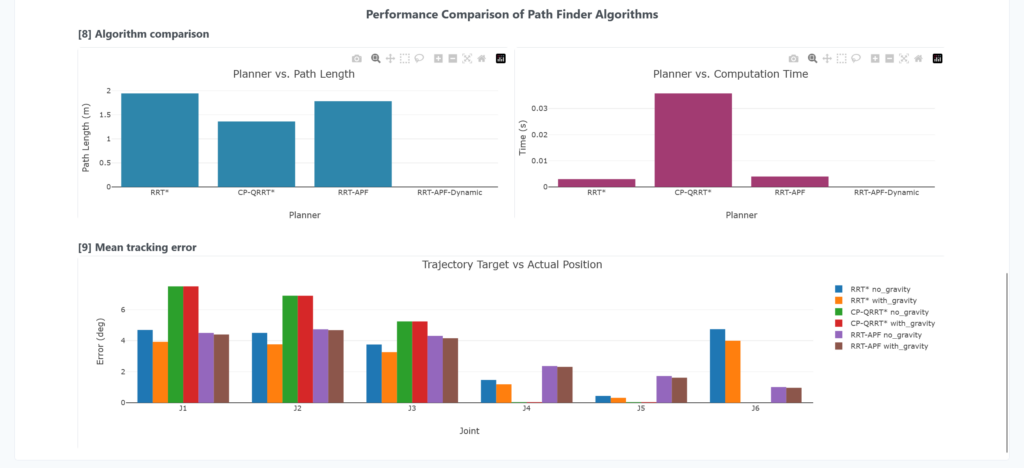
Figure 7. Object details and comparison of newly planned trajectories by OAAs.
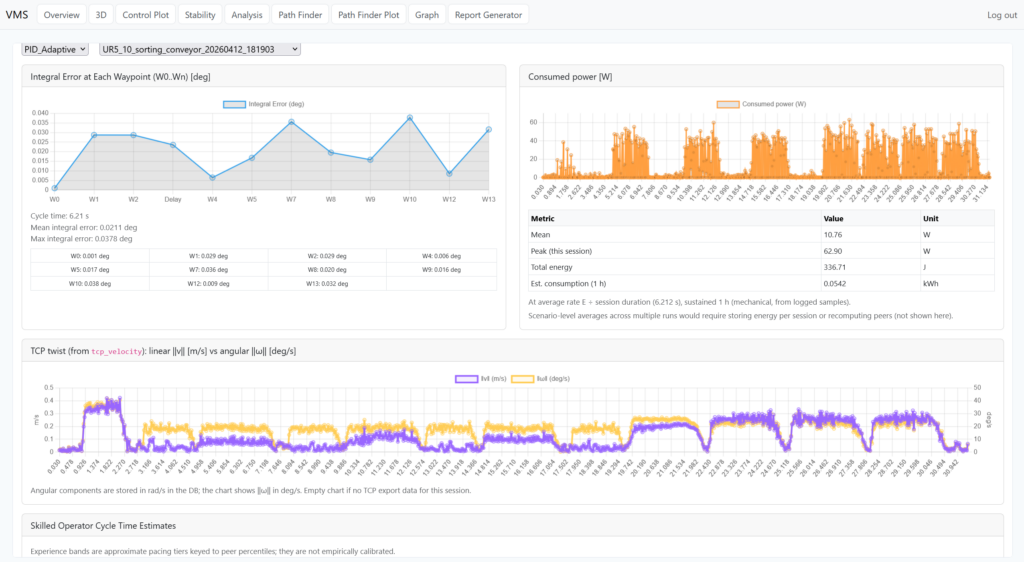
Figure 8. Analysis of the manipulator: cycle time, power consumption, etc. (customizable items)