Modeling and Design Process
This section highlights how we develop our manipulator and control systems.

Parameters and Variables (Model Identification)
Identifying parameters and variables for the modeling process is very important. Our mathematical model simulations are always validated against the corresponding physical model to ensure the accuracy of the digital twin simulation when implemented.
Operating Points Analysis (Trajectory Tracking)
Analyzing the movement trajectory, steady-state conditions at different operating points, and stability margins is critical to plant operation. When sufficient data is available, we can train the controllers to keep the system in optimal states.
Simulation (Constrain Detection)
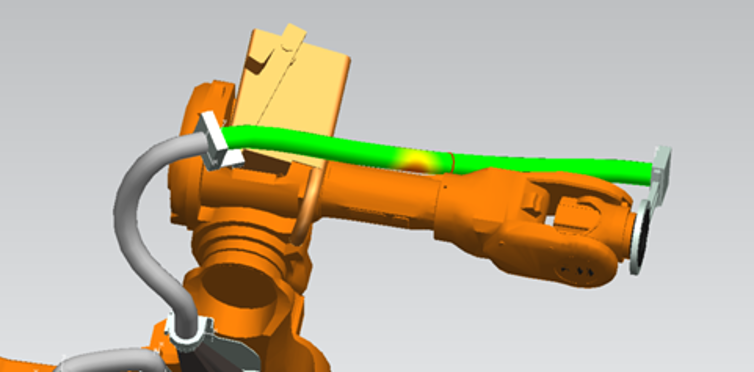
There are many other constraints to consider in real plant operations, such as cable deformation when manipulators are constantly in motion. Most of these constraints are built into our simulation scenarios to detect any anomalies or errors that may cause production loss.
Verification With Real-World Scenarios
This section presents practical examples that illustrate how customers successfully utilize our offerings to solve key challenges and drive meaningful improvements.
Model Computation
The modeling manipulator involves creating a detailed digital representation that captures its mechanical structure, joints, and degrees of freedom. This includes defining the kinematic and dynamic properties, such as link lengths, joint types, and mass distribution. Additionally, interlinked joint interactions are incorporated in the dynamic motion to ensure accurate simulation of real-world behavior. All of these are computed by the VMS physics engine, and the results serve as the foundation for analyzing performance, optimizing control strategies, and validating the manipulator’s functionality in a virtual environment.
Design
The modeled manipulator from the VMS physics engine accurately simulates its physical behavior. It uses real-world physics principles such as kinematics, dynamics, and collision detection to predict how manipulators move and interact with their environment. By integrating forces, torques, and constraints, the engine enables precise analysis and control of manipulator motions, thereby enhancing simulation-based design, testing, and optimization processes.
Performance Review
The control algorithm is modeled using the manipulator’s dynamic model to design appropriate control strategies that plan trajectories, govern its motion, and control the response. By incorporating the manipulator’s physical parameters and operating conditions, the control system can accurately predict and adjust movements, whether point-to-point or continuous. Stability analysis is then performed on the closed-loop system to evaluate its behavior under various operating points, ensuring that the manipulator operates reliably and maintains stability throughout all motions and tasks.
Single Unit Test
Before simulating the manipulator, several other constraining sub-parts must be taken into account when applying the manipulator to the digital twin simulation, such as cable deformation as the manipulator operates in different positions.
Error Detection & Correction
With the manipulator model, control algorithms, PLC logic, and production scenarios in place, the complete digital twin simulation model is created and ready for commissioning.
System Upgrades Impact Test
Once the error correction process is complete, system upgrade and/or modification scenarios are created to identify the probable issue or impact caused by changes made to the existing plant.
Assembly Line Commission Test
With the manipulator model, control algorithms, PLC logics, and production scenarios altogether, the complete digital twin simulation model is created and ready for commissioning and implementation.